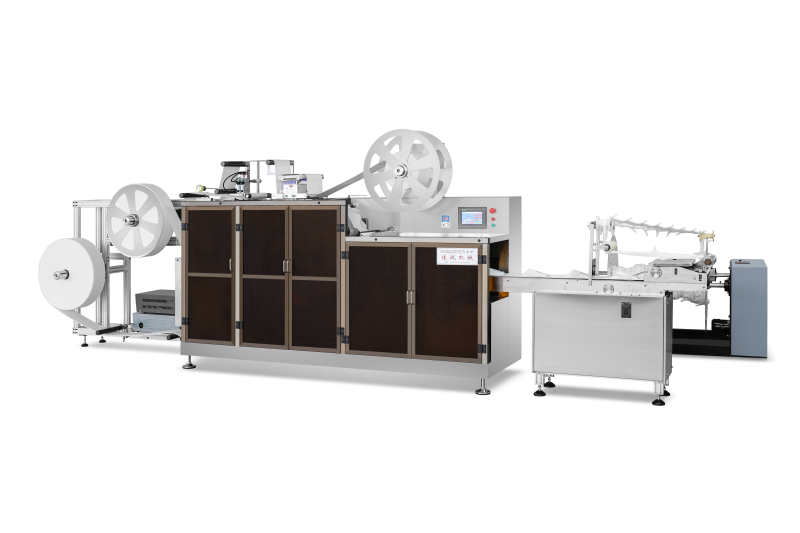
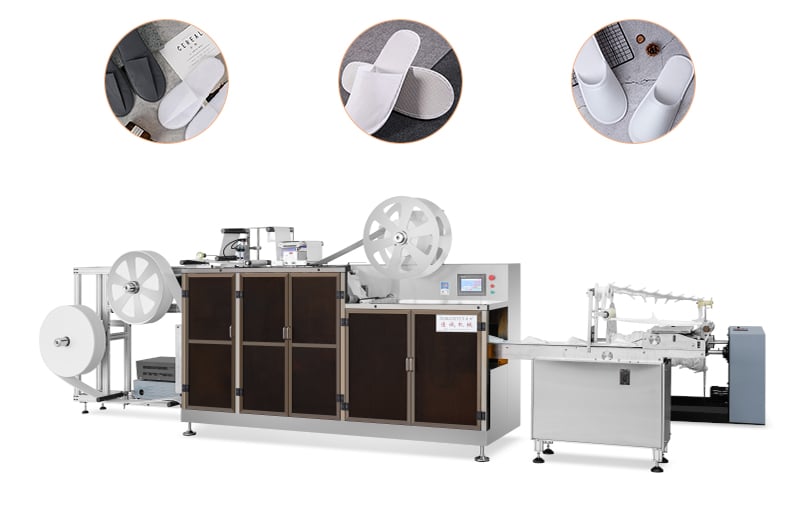




In response to the growing demand for mid to high end disposable slippers in the market, our company has meticulously researched the structure and process flow of slippers, innovative designed and rationalized the layout of slipper machine equipment. From the roll material passing through a segmented mechanism, automatic upper making, roll material automatic feeding, roll material automatic spraying, ultrasonic welding, traction, rolling cutting, finished product output, to automatic completion of the entire line. It can be equipped with a roll embossing mechanism and an intelligent logo spraying system. The whole machine has a novel structure, small footprint, stable and reliable operation, convenient control, fast adjustment, and high yield.
|
Items |
TX-80 |
|
Production Speed |
50-90 pieces/minute |
|
Power Supply |
AC380V,50Hz/60Hz |
|
Total Power |
16kw |
|
Ultrasonic Welding Pressure Frequency |
8kHz×2pieces |
|
Dimension |
4825mm * 1850mm * 1685mm |
|
Weight |
2200Kg |
3.1 Solid materials used
The whole machine is mostly welded with steel plates for aging and shaping, and the surface of the body is finely processed to ensure accurate installation shape and position. The body is stable and heavy, eliminating the impact of mechanical and ultrasonic vibration on the stability of equipment operation, and increasing the service life of the equipment.
3.2 Servo Control System
Using a servo system for drive control, ensuring that each workstation is always in synchronous operation. The position adjustment of each workstation is parameterized through a human-machine interface, which is convenient, fast, and intuitive to operate, avoiding the inconvenience or damage caused by mechanical adjustment.
3.3 Automatic Discharge And Waste Collection
Using a roll film automatic feeding system, the tension is constant during the roll film feeding process, the feed position is precise, and the cutting position is uniform. It can greatly increase the yield of finished products. After discharge, the waste edge is equipped with a large waste collection mechanism, which can effectively save labor and factory space, and improve production efficiency.
3.4 Automatic Glue Spraying System
The automatic glue spraying system consists of a main unit and a nozzle. It has functions such as fine atomization, targeted glue spraying, controllable glue amount, convenient cleaning, and adjustable glue spraying position, which ensures even product spraying while saving glue amount.
3.5 Flywheel Folding
The flywheel folding mechanism is independently controlled by a servo. After the coil is segmented, it enters the folding mechanism for positioning and folding. It has functions such as adjustable folding angle, precise synchronization, and controllable folding position.
Machine can produce thick sole slippers
Contact us today for a free consultation and quote. Our team of experts is here to assist you every step of the way.
![]() Email: [email protected]
Email: [email protected]
![]() Phone: +8615382581100
Phone: +8615382581100



